Descripción
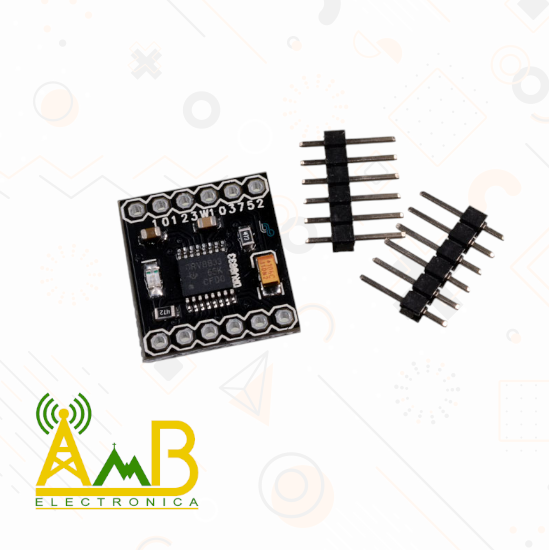
El Controlador de Motor Dual DRV8833 es un driver compacto y potente diseñado para controlar hasta 2 motores DC de forma independiente, o un motor paso a paso bipolar, con una corriente continua de hasta 1.5A por canal (pico de 2A). Gracias a su diseño basado en el chip DRV8833 de Texas Instruments, este módulo ofrece un rendimiento eficiente, bajo calentamiento y protección integrada contra sobrecorriente, sobretemperatura y subtensión.
Su diseño compacto lo convierte en la opción ideal para robots móviles, mini vehículos autónomos, sistemas de engranajes motorizados y proyectos portátiles, donde el espacio y la eficiencia energética son clave. Es totalmente compatible con microcontroladores como Arduino, ESP32, Raspberry Pi, STM32, PIC, entre otros.
Además, permite control por modulación PWM (control de velocidad) y tiene la capacidad de controlar la dirección de giro de cada motor. Ofrece también un modo de parada rápida (brake) y libre (coast) para un mayor control del comportamiento del motor.
Características :
Chip controlador: DRV8833 de Texas Instruments
Canales de control: 2 (motor dual o 1 paso a paso bipolar)
Voltaje de operación (motor): 2.7V – 10.8V DC
Voltaje lógico (entrada): 2.7V – 5.5V DC (compatible con 3.3V y 5V)
Corriente por canal: Hasta 1.5A (pico de 2A por corto tiempo)
Protecciones integradas: Sobretemperatura, sobrecorriente, subtensión
Control de velocidad: Compatible con PWM
Control de dirección: Entrada digital IN1/IN2 (por canal)
Modos de operación: Avance, reversa, freno activo y giro libre
Tamaño compacto: Aprox. 17 x 16 mm
Compatibilidad: Arduino, ESP32, Raspberry Pi, STM32, otros.
Funcionalidades destacadas:
Control preciso de 2 motores DC (velocidad y dirección)
Compatible con señales lógicas de 3.3V y 5V (ideal para Arduino y ESP)
Alta eficiencia energética para dispositivos alimentados por batería
Control por PWM para ajuste de velocidad
Protecciones electrónicas integradas para mayor seguridad del sistema
Control bidireccional: avance, retroceso, freno activo o parada libre
Adecuado para pequeños robots, autos autónomos, brazos robóticos, mecanismos con poleas, entre otros
Formas de uso:
Robots miniatura o de tamaño medio.
Automatización de puertas o mecanismos de movimiento.
Vehículos dirigidos por Arduino o ESP32.
Proyectos de robótica educativa.
Control de motores en proyectos DIY con espacio limitado.
Conexión:
Motores: Hasta 2 motores DC o 1 motor paso a paso bipolar.
Alimentación del motor: De 2.7V a 10.8V DC.
Alimentación lógica: De 2.7V a 6.8V DC.
Entradas de control: Pines IN1, IN2, IN3, IN4 para control de dirección.
Control PWM: Compatible con microcontroladores como Arduino, ESP8266, ESP32, Raspberry Pi.
Terminales de tornillo o pines para conexión segura de motores.
Notas de uso:
Control independiente: Puedes controlar cada motor por separado con 2 pines digitales (IN1/IN2 por canal), permitiendo sentido y velocidad variable mediante PWM.
Velocidad con PWM: Usa
analogWrite()en Arduino para aplicar PWM y regular la velocidad del motor.Parada rápida o libre: Puedes implementar freno electrónico conectando ambas entradas del canal al mismo nivel (HIGH o LOW).
Compatibilidad lógica: Funciona con microcontroladores de 3.3V (ESP32, Raspberry Pi) y 5V (Arduino Uno, Mega, etc.) sin resistencias niveladoras.
Conexión de motores paso a paso: Puedes conectar un motor paso a paso bipolar si usas ambos canales de manera coordinada.
Alimentación separada: Aunque se puede alimentar desde la misma fuente del microcontrolador en cargas pequeñas, es recomendable una fuente independiente para motores más grandes.
Montaje compacto: Ideal para proyectos donde el espacio es limitado, como microrobots o drones terrestres.


Valoraciones
No hay valoraciones aún.