Descripción
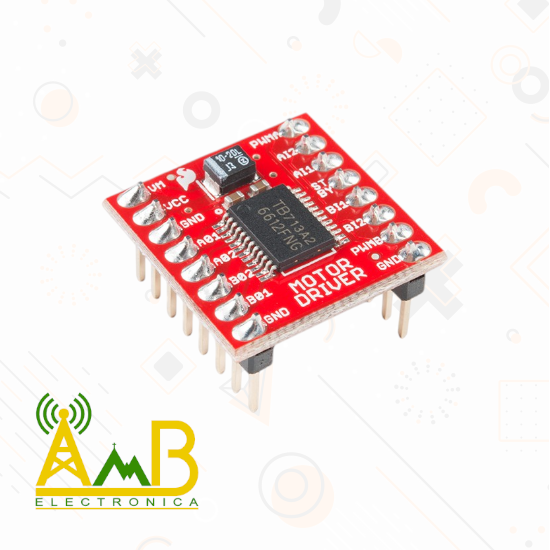
El Módulo Controlador de Motor TB6612FNG es un driver de doble puente H compacto y eficiente, ideal para controlar hasta dos motores DC de manera independiente, o un motor paso a paso bipolar. Este módulo ofrece una alternativa moderna al clásico L298N, proporcionando mayor eficiencia, menor generación de calor y mejor compatibilidad con plataformas de 3.3V, como ESP32, Raspberry Pi o STM32.
Soporta corrientes de hasta 1.2A por canal en uso continuo (picos de hasta 3A), lo que lo hace adecuado para robots móviles, vehículos autónomos, mecanismos motorizados pequeños y proyectos de automatización educativa o casera. Además, permite controlar la dirección y velocidad de los motores mediante señales digitales y PWM.
El diseño compacto, la baja caída de voltaje y su compatibilidad con niveles lógicos de 3.3V o 5V hacen del TB6612FNG una excelente elección para proyectos modernos de electrónica y robótica.
Características :
Chip controlador: TB6612FNG de Toshiba
Canales: 2 (doble puente H)
Motores compatibles: Motores DC y motores paso a paso bipolares
Voltaje del motor (VM): 2.5V – 13.5V
Voltaje lógico (VCC): 2.7V – 5.5V
Corriente por canal: 1.2A continuo, hasta 3A pico
Caída de voltaje baja: Menor generación de calor que L298N
Control de velocidad: PWM hasta 100 kHz
Control de dirección: Entradas digitales IN1/IN2 e IN3/IN4
Entradas adicionales:
STBY(Standby): activa/inactiva el módulo
Dimensiones: 21 x 18 mm aprox.
Compatibilidad: Arduino, ESP8266/ESP32, Raspberry Pi, STM32, PIC, etc.
Incluye: Header pre-soldado o para soldar (según modelo)
Funcionalidades :
Control independiente de dos motores DC
Control de dirección y velocidad con precisión
Menor generación de calor en comparación con drivers antiguos (L298N)
Compatible con microcontroladores de 3.3V y 5V
Adecuado para robots pequeños, carritos de dos ruedas, mini grúas, etc.
Permite freno activo y giro libre por combinación de señales
Soporta motores paso a paso bipolares si se usan ambos canales
Formas de uso:
Control de robots móviles o carritos inteligentes.
Proyectos de domótica para automatización de motores.
Manejo de motores paso a paso bipolares para CNC o impresoras 3D.
Vehículos controlados remotamente (RC).
Experimentación educativa de control de motores con microcontroladores.
Conexión:
VM (Voltaje del Motor): 2.5V a 13.5V.
VCC (Lógica): 2.7V a 5.5V (compatible con 3.3V y 5V).
Entradas:
IN1, IN2 (Motor A)
IN3, IN4 (Motor B)
PWM (Control de velocidad):
PWMA (Motor A)
PWMB (Motor B)
STBY: Pin para activar o desactivar el módulo.
Salidas de motor: A01, A02 (Motor A) — B01, B02 (Motor B).
GND: Tierra común.
Es recomendable usar condensadores de desacoplo y fuentes de alimentación estables para evitar caídas de voltaje durante los picos de corriente.
Notas de uso
Activación del módulo: El pin
STBYdebe estar en HIGH para habilitar el funcionamiento. Si lo dejas en LOW, el driver entra en modo de reposo.Control de dirección: Cada canal se controla con 2 entradas digitales (ej. IN1/IN2), que definen el sentido de giro del motor.
Control de velocidad: Aplica una señal PWM en los pines
PWMAoPWMBpara ajustar la velocidad del motor.Conexión a microcontroladores:
Compatible directamente con señales de 3.3V (ESP32, Raspberry Pi) y 5V (Arduino Uno, Mega)
No requiere transistores ni conversores de nivel
Uso con motores paso a paso: Puedes usar ambos canales sincronizados para controlar un motor paso a paso bipolar.
Diseño compacto: Ideal para robots de tamaño reducido o proyectos en espacios limitados.
Evita sobrecalentamiento: Aunque es eficiente, en uso prolongado a más de 1A se recomienda buena ventilación.

Valoraciones
No hay valoraciones aún.