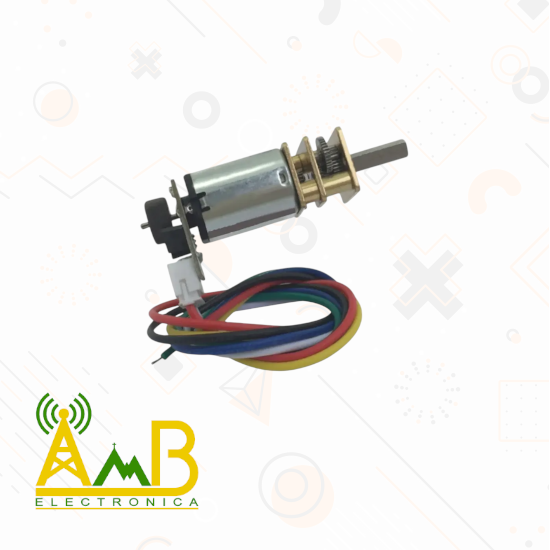
El Encoder Magnético para Motor N20 es un dispositivo compacto y altamente preciso diseñado para medir la velocidad, posición y dirección de giro de motores de tipo N20. Utiliza tecnología de efecto Hall o sensores magnéticos para detectar la rotación de un imán montado en el eje del motor, generando pulsos eléctricos que pueden ser interpretados por microcontroladores o sistemas de control para obtener información detallada del movimiento.
Estos encoders son esenciales en aplicaciones de robótica, automatización, impresión 3D, sistemas de posicionamiento y cualquier otra aplicación que requiera control preciso de velocidad y posición. Gracias a su pequeño tamaño, se integra fácilmente con motores N20 sin requerir modificaciones complejas, permitiendo un diseño compacto y ligero.
Además, su configuración magnética le otorga alta resistencia al polvo, humedad y vibraciones, superando en robustez a los encoders ópticos tradicionales. Esto los hace ideales para entornos industriales o aplicaciones móviles donde se requiere alta confiabilidad y precisión.
Características:
- Compatibilidad: Motores tipo N20
- Tecnología de detección: Efecto Hall / Sensor magnético
- Voltaje de operación: 3.3V – 5V DC
- Resolución: Dependiente del diseño del imán y el sensor (típicamente 6 a 12 pulsos por revolución)
- Formato de señal: Salida digital cuadrada (pulso)
- Tamaño compacto: Diseñado para montaje directo en motores N20
- Alta robustez: Resistente al polvo y vibraciones
- Fácil integración: Conector estándar para fácil conexión a microcontroladores y sistemas de control
- Bajo consumo de energía
Funciones Principales:
- Medición de Velocidad: Permite obtener la velocidad precisa del eje del motor en tiempo real.
- Detección de Dirección: Identifica el sentido de giro para control bidireccional.
- Control de Posición: Utilizado para sistemas de bucle cerrado y controladores PID.
- Detección de Revoluciones: Ideal para sistemas de conteo y control de posición precisa.
- Mejora en el Control del Motor: Permite ajustes precisos en la aceleración y desaceleración del motor.
Notas de Uso:
- Monta el encoder con precisión para evitar desalineación que pueda afectar la precisión.
- Asegúrate de conectar correctamente los cables para evitar daños al sensor.
- Utiliza filtros o resistencias de pull-up si es necesario para estabilizar las señales.
- Mantén los cables lo más cortos posible para minimizar el ruido eléctrico.
- Configura correctamente el software para interpretar correctamente los pulsos generados.
Advertencias:
- No exceder el voltaje máximo de operación para evitar daños permanentes.
- Evitar exposición prolongada a calor extremo o ambientes corrosivos.
- No aplicar fuerza excesiva al montaje para evitar daños mecánicos.
- Manipular con cuidado para no dañar los componentes internos.