¿Te has preguntado cómo mover un servomotor con solo girar una perilla? Este sencillo proyecto es ideal para principiantes en electrónica y robótica, y utiliza un Arduino UNO, un servomotor y un potenciómetro para lograrlo.
Objetivo del Proyecto
Controlar la posición de un servomotor en función del giro de un potenciómetro. A medida que giramos el potenciómetro, el ángulo del servo cambia proporcionalmente, permitiendo un control manual de la dirección.
🧰 Materiales Necesarios
| Componente | Cantidad |
|---|---|
| Arduino UNO | 1 |
| Servomotor (SG90 u otro) | 1 |
| Potenciómetro de 10kΩ | 1 |
| Protoboard | 1 |
| Cables de conexión | 4-5 |
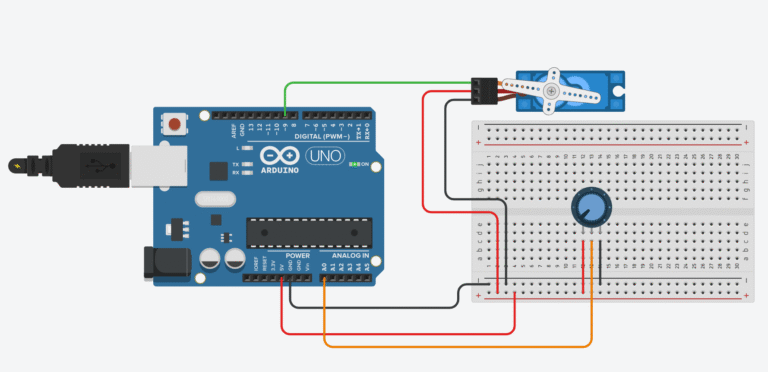
🔌 Conexiones
🔧 Servomotor:
Cable naranja (señal) → pin 9 de Arduino
Cable rojo (VCC) → 5V de Arduino
Cable marrón o negro (GND) → GND de Arduino
🔧 Potenciómetro:
Pin izquierdo → 5V
Pin derecho → GND
Pin central (señal) → A0 de Arduino
🧠 Código Arduino
#include <Servo.h>
Servo miServo; // Crea un objeto tipo Servo
int potPin = A0; // Pin donde está conectado el potenciómetro
int valor; // Variable para leer el valor del potenciómetro
void setup() {
miServo.attach(9); // Conectamos el servo al pin digital 9
}
void loop() {
valor = analogRead(potPin); // Leemos el valor del potenciómetro (0 a 1023)
int angulo = map(valor, 0, 1023, 0, 180); // Convertimos el valor en un ángulo de 0° a 180°
miServo.write(angulo); // Movemos el servo a ese ángulo
delay(15); // Pequeño retraso para mayor estabilidad
}
Funcionamiento
Al girar el potenciómetro, se genera una señal analógica que el Arduino convierte en un valor digital entre 0 y 1023. Esta señal se traduce a un ángulo entre 0 y 180 grados mediante la función map(), lo que permite controlar suavemente la posición del servomotor.
Aplicaciones
Control de dirección en pequeños robots
Posicionamiento de cámaras
Sistemas de apertura de compuertas o mecanismos
Prácticas de introducción al control analógico-digital
Conclusión
Este proyecto demuestra cómo es posible traducir una señal analógica simple en un movimiento mecánico preciso, utilizando Arduino como intermediario. Es una excelente base para proyectos más avanzados de robótica, mecatrónica o automatización.